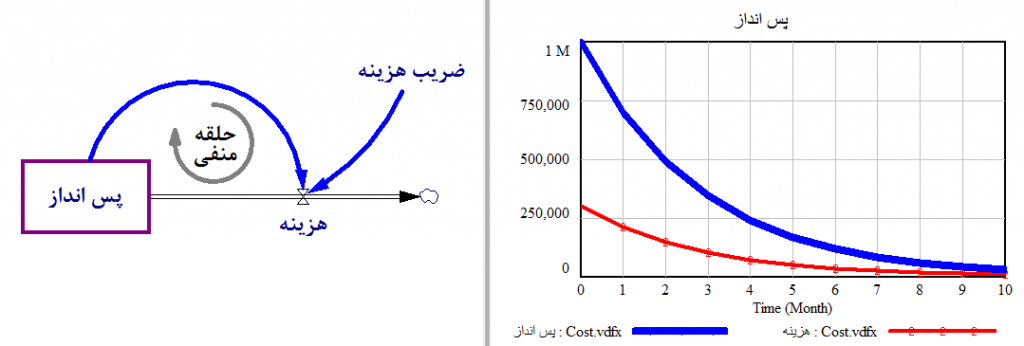

منحنی نمایی منفی یا رفتار «هدف جو» نتیجه فعال بودن یک «حلقه منفی» در سیستم است. این منحنی «وضعیت سیستم» را در حالی به «هدف سیستم» نزدیک میکند که در فواصل زمانی یکسان، نیمی از فاصله «وضعیت سیستم» با «هدف سیستم» کم میشود. به عبارت دیگر، منحنیهای نمایی منفی دارای «نیمه عمر» هستند.
«نظریه ساختمان سیستم» در دینامیک سیستمها، روشی موثر برای فهم ساختار سیستمها و ارتباط برقرار کردن بین «ساختار سیستم» و «رفتار سیستم» ارایه میکند.
«خود کارآمدی» باوری است که نسبت به توانمندی خود نسبت به موفقیت در انجام یک کار خاص داریم.
«ناتوانی آموخته شده» ناشی از شکستهای گذشته است. وقتی حس کنیم در زمینهای نمیتوانیم موفق شویم، دیگر تلاش نمیکنیم و همیشه شکست خورده باقی میمانیم.
«پیش گویی خود محقق کننده» زمانی اتفاق میافتد که بر مبنای آن پیشگویی کارهایی انجام میدهیم که موجب به وقوع پیوستن آن پیشگویی میشود.
تفکر سیستمی در آینده پژوهی با مدلسازی و شبیه سازی سیستمها به دنبال طراحی سیستم برای رسیدن به آینده مطلوب و یافتن نقاط اهرمی برای تغییر است.
دینامیکهای رشد نشان میدهند که رشد عوامل مختلف در سیستمهای طبیعی و سیستمهای اقتصادی و اجتماعی چگونه به وجود میآید.
وابستگی به مسیر در اثر ایجاد انباشتهایی در مسیر رشد به وجود میآید. تغییر مسیر باعث از دست دادن یا کم اثر شدن این انباشتها خواهد شد.
بازی پولیا زمینه مناسبی برای گفتگو در مورد ساختارهای ایجاد کننده «وابستگی به مسیر» در زندگی فردی و در سیستمهای اقتصادی و اجتماعی ایجاد میکند.
کهن الگوی «محدودیت رشد» یک ساختار شناخته شده سیستمی است که طی آن، سرعت رشد در نتیجه مواجهه با محدودیتهایی کم شده و نهایتا متوقف میشود.
کهن الگوی «تراژدی منابع مشترک» یک ساختار شناخته شده سیستمی است که طی آن، منابع مشترک مورد استفاده بی رویه قرار میگیرند و از بین میروند.
کهن الگوی «رشد و سرمایه گذاری ناکافی» ساختاری است که طی آن با تاخیر در سرمایه گذاری، کیفیت محصولات و خدمات افت میکند و رشد متوقف میشود.